SReachTools: A MATLAB Toolbox for stochastic reachability computation
SReachTools is an open-source (GPLv3) stochastic reachability toolbox, written in MATLAB. SReachTools has been repeatability-evaluated at the Hybrid Systems: Computation and Control, 2019. It implements all the algorithms I developed as part of my PhD work. It was developed in collaboration with J. Gleason.
- Toolbox details
- Project website https://sreachtools.github.io/
- Code repository — https://github.com/sreachtools/SReachTools
- See this toolbox in action — Spacecraft rendezvous problem, a stochastic reach-avoid problem where we wish to dock two spacecrafts safely
- My paper on stochastic reachability of a target tube summarizes the theoretical properties and (some of the) computational algorithms used.
- A project post detailing this mathematical framework for generating probabilistic guarantees of safety and performance.
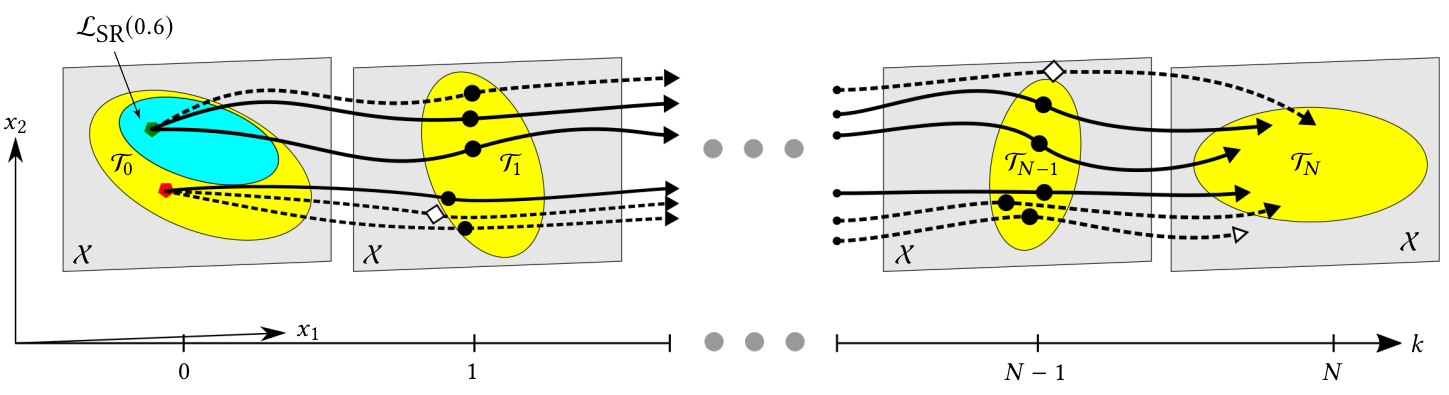
For safety-critical applications, it is important that we construct either exact or underapproximations of the set of safe initial states. We do not want to be over-confident in our safety declarations, i.e., declare an initial state safe when it is not really safe.
SReachTools utilizes convex optimization, stochastic optimization, Fourier transforms, and computational geometry to construct underapproximations of the set of safe initial states and controllers that satisfy hard control bounds. Further, by being grid-free, SReachTools does not directly suffer from the curse of dimensionality that plagues the state-of-the-art dynamic programming-based solutions.